3.4 摇杆模块
新建一个文件,编写程序使ADC读取摇杆数值变化并打印,将文件保存至Raspberry Pi Pico,命名如joystick.py。
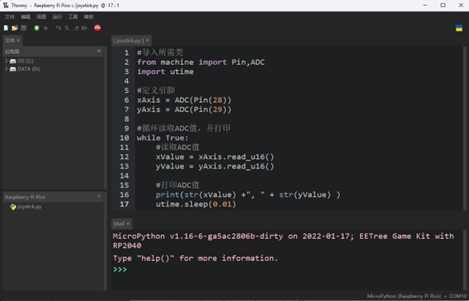
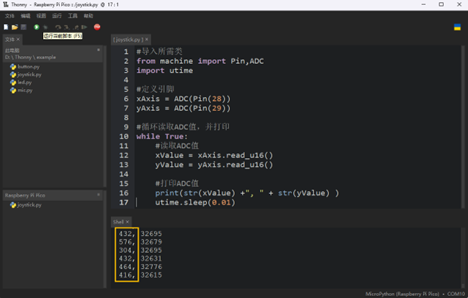
源码如下:
#导入所需Pin,ADC类
from machine import Pin,ADC
import utime
#定义引脚
xAxis = ADC(Pin(28))
yAxis = ADC(Pin(29))
#循环读取ADC值,并打印
while True:
#读取ADC值
xValue = xAxis.read_u16()
yValue = yAxis.read_u16()
#打印ADC值
print(str(xValue) +", " + str(yValue) )
utime.sleep(0.01)
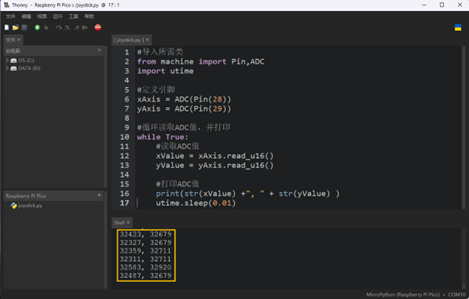
运行代码,ADC数值在命令行中显示,如下图所示。
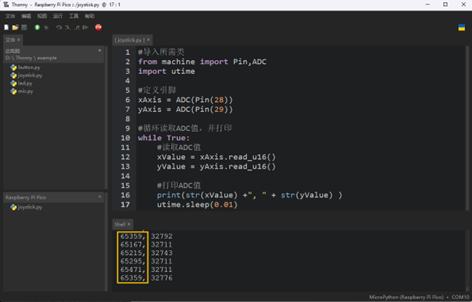
当控制摇杆至X轴正方向,数值变化如下图,X轴打印出的数值明显增大。
当控制摇杆至X轴负方向,数值变化如下图,X轴打印出的数值明显减小。
同理,当控制摇杆在Y轴上移动时,Y轴打印出数值也会随之变化,当移动至Y轴正方向,数值增大,当移动至Y轴负方向,数值减小。此时说明摇杆模块正常工作。